ASU-designed C-Turtle robot teaches itself to get around
Technology comes from collaboration between computer science, mechanical engineering and biology.
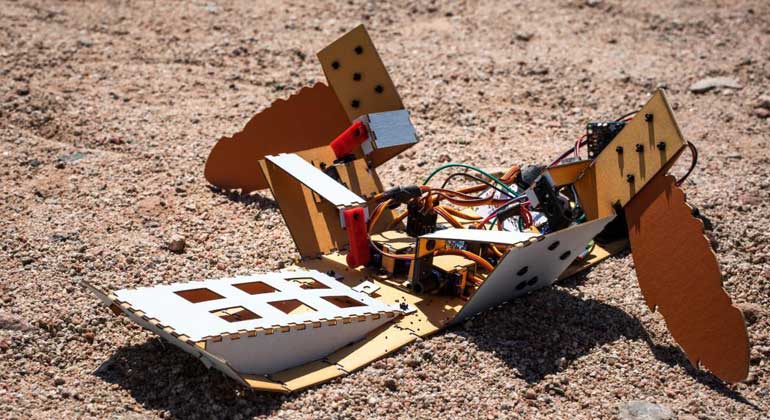
It looks like the beginning of a Star Wars movie: a lone robot pushing itself across the sand with a pair of orange flippers toward lumpy red buttes in the distance.
Look closer at it. The leading edge is curved upward like a turtle’s bottom shell, so it doesn’t dig into the ground. The flippers are curved, also like a turtle’s.
The robot looks like a turtle because that was the intent of a pair of Arizona State University roboticists and a band of doctoral students.
It’s called C-Turtle. Designed with inspiration from biology — one of the team members is earning a doctorate in evolutionary biology — it learns how to navigate different types of terrain.
C-Turtle was an exercise in developmental robotics, where you build robots to test hypotheses. The team will present two papers about C-Turtle this summer at MIT and Stanford. One paper will compare the design with its biological inspirations. The other will describe the robot’s algorithmic learning process in the lab and in the desert.
The robot was a collaboration between different backgrounds: computer science, mechanical engineering and biology.
“From my point of view, it’s a fascinating approach,” said Heni Ben Amor, an assistant professor in the School of Computing, Informatics and Decision Systems Engineering.
Ben Amor collaborated with Daniel Aukes, an assistant professor in engineering at the Polytechnic School. Ben Amor’s background is in artificial intelligence. Aukes’ is in designing, fabricating and building robots.
Ben Amor’s team worked on machine learning; Aukes’ team worked on the manufacturing aspect.
“I’m really pleased my students were able to pair a really simple mechanism like this robot to the higher aspects of computer sciences that Heni is working on,” Aukes said.
C-Turtle took one hour of learning to walk in the sand in an earlier desert test. It’s made for sandy environments. “It finds that on its own,” team member Andrew Janssen said. “We don’t tell it what to do.”
“If we use tricks from nature, it learns much faster,” Ben Amor said. “You can use that initial inspiration from nature to get things going.”
Janssen, a doctoral candidate in evolutionary biology, helped design the robot. He traced the profile of a sea-turtle flipper.
“It turns out the ones shaped like that work better than just a square paddle,” Janssen said. “We tested things that are impossible in nature. They didn’t work.”
C-Turtle has to dig hard to propel itself across the sand, but not so hard it digs holes. Nature-inspired, the design succeeds.
Sea turtles are “gigantic animals and they move across sand pretty easily,” Janssen said.
Biology short-cuts problems in robotics, including design, Aukes said. He has worked with a biologist at Harvard, using laminate fabrication to imitate insect wings.
“This synergy between biologist and robotics designers goes back a ways,” he said.
Another unusual aspect of C-Turtle is that it’s fabricated out of thin cardboard. They’re designed to be cheap and disposable. Each robot cost about $70. The motors cost about $5 and the chips about $10. Joseph Campbell, a Ph.D. student in the Interactive Robotics Laboratory, was one of the designers.
Three-dimensional printers are making robotics easier. Parts don’t have to be laboriously machined. Aukes teaches a foldable-robotics class.
Team member Kevin Luck, a computer science doctoral candidate, envisions a stack of paper and a laser cutter being shipped to Mars someday and a fleet of bots self-assembling.
“At the end of the day, you would have a working robot,” Luck said.
Potentially, a pack of them could roam around on Earth, monitoring certain types of conditions or performing tasks like searching minefields.
“How do you have a lot of these little robots collaborate and learn from each other?” Aukes said. “I’m excited that we can use this to work on the complex dynamics between robots.”